

Cover photo by Gerhard Diedericks.
Find the Keyhole Glider in the FBIS database (Freshwater Biodiversity Information System) here.
Family Libellulidae
Identification

Mpempe Pan, KwaZulu-Natal
Photo by Ryan Tippett
Medium sized
Length up to 50mm; Wingspan attains 93mm.
The Keyhole Glider most resembles Tramea limbata (Ferruginous Glider). That species is similar in both size and shape but has narrower, darker markings at the base of the hind wings and a dark brown face. Tramea basilaris has a red face with a variable amount of yellow.
Females are similar to males but are yellowish-brown in colouration.
Click here for more details on identification of the Keyhole Glider.

Hluhluwe district, KwaZulu-Natal
Photo by Ryan Tippett
Habitat
The Keyhole Glider inhabits a wide range of freshwater environments, but favours the still, ephemeral waters of pans, pools, and marshes. It is regularly found away from water especially in open, grassy areas with scattered bushes and trees.

Photo by Ryan Tippett
Behaviour
The Keyhole Glider is more often seen in flight than it is perched. Tramea basilaris has a smooth, gliding flight as it patrols back and forth along an irregular route. It sometimes hovers for a few seconds before continuing on its way. The Keyhole Glider perches on top of bushes, trees, and reeds. It is often found singly but is likely to be gregarious at favourable sites. The Keyhole Glider is a highly nomadic species that moves about in response to rainfall.
The Keyhole Glider is active from November to May.

Ehlatini Bush Camp, KwaZulu-Natal
Photo by Ryan Tippett
Status and Conservation
The Keyhole Glider is common but highly nomadic and erratic in its occurence. It may be abundant at certain sites. The Keyhole Glider is listed as of Least Concern in the IUCN Red List of Threatened Species.

Hluhluwe district, KwaZulu-Natal
Photo by Ryan Tippett
Distribution
Tramea basilaris is widespread throughout Sub-Saharan Africa. It is liable to be encountered almost anywhere but is most common in the savanna regions. It’s range extends beyond Africa into parts of the Middle East and Asia. The Keyhole Glider also occurs on Madagascar and many of the Indian Ocean Islands.
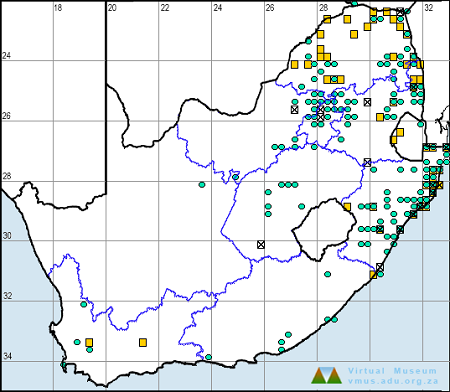
In South Africa it is mostly found in the north and east but vagrants can turn up almost anywhere.

Kosi Bay, iSimangaliso Wetland Park, KwaZulu-Natal
Photo by Ryan Tippett
Below is a map showing the distribution of records for Keyhole Glider in the OdonataMAP database as at February 2020.

Below is a map showing the distribution of records for Keyhole Glider in the OdonataMAP database as of December 2024.
The next map below is an imputed map, produced by an interpolation algorithm, which attempts to generate a full distribution map from the partial information in the map above. This map will be improved by the submission of records to the OdonataMAP section of the Virtual Museum.


Ultimately, we will produce a series of maps for all the odonata species in the region. The current algorithm is a new algorithm. The objective is mainly to produce “smoothed” maps that could go into a field guide for odonata. This basic version of the algorithm (as mapped above) does not make use of “explanatory variables” (e.g. altitude, terrain roughness, presence of freshwater — we will be producing maps that take these variables into account soon). Currently, it only makes use of the OdonataMAP records for the species being mapped, as well as all the other records of all other species. The basic maps are “optimistic” and will generally show ranges to be larger than what they probably are.
These maps use the data in the OdonataMAP section of the Virtual Museum, and also the database assembled by the previous JRS funded project, which was led by Professor Michael Samways and Dr KD Dijkstra.

Charters Creek, iSimangaliso Wetland Park, KwaZulu-Natal
Photo by Ryan Tippett
Further Resources
The use of photographs by Gerhard Diedericks is acknowledged. All other photographs by Ryan Tippett.
Keyhole Glider Tramea basilaris (Palisot de Beauvois, 1807)
Other common names: Loerswewer (Afrikaans)
Recommended citation format: Loftie-Eaton M; Navarro R; Tippett RM; Underhill L. 2025. Keyhole Glider Tramea basilaris. Biodiversity and Development Institute. Available online at https://thebdi.org/2020/05/12/keyhole-glider-tramea-basilaris/
References: Tarboton, M; Tarboton, W. (2019). A Guide to the Dragonflies & Damselflies of South Africa. Struik Nature.
Samways, MJ. (2008). Dragonflies and Damselflies of South Africa. Pensoft
Samways, MJ. (2016). Manual of Freshwater Assessment for South Africa: Dragonfly Biotic Index. Suricata 2. South African National Biodiversity Institute, Pretoria
Martens, A; Suhling, F. (2007). Dragonflies and Damselflies of Namibia. Gamsberg Macmillan.

Nibela Peninsular, KwaZulu-Natal
Photo by Ryan Tippett